| loopingsimulator Nr.1 | loopingsimulator Nr.2 | |||
| start | willkommen | fliegen 1 | fliegen 2 | fliegen 3 | modell | surfen | praxis | familie |
| loopingsimulator Nr.1 | loopingsimulator Nr.2 | |||
|
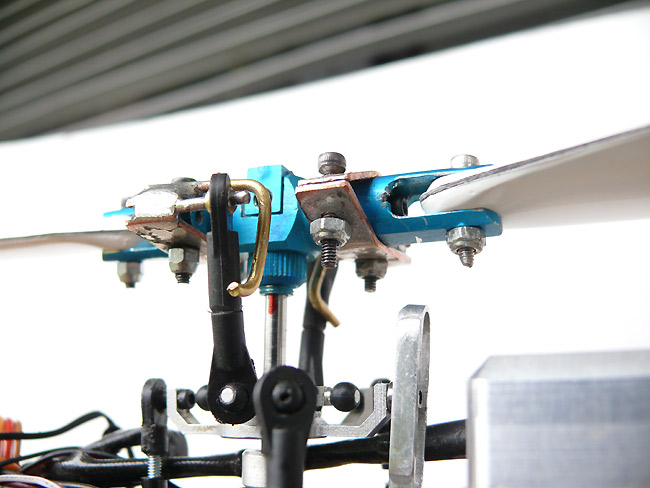
2016-1970 Hier erlaube ich mir einen Sprung ganz weit zur³ck: Ich bekam vor einiger Zeit ein Video meines allerersten RC-Helifluges 1970. Es war das Modell Cobra von Ing. Schlueter. Wir Modellflieger in Friedrichshafen konnten damals auf dem Flugplatz Friedrichshafen fliegen. Im Hintergrund erkennt man sogar noch Raketenstationen der Bundeswehr. Die Raketen sind auf uns gerichtet! Das Polyester-GFK-Modell war in einer Form hergestellt, dann von mir gekauft, gespachtelt, geschliffen und lackiert. Die Mechanik mit einem 10er Webra-Methanolmotor habe ich heute noch. Die Rotorblõtter hatten eine feste Pitch-Einstellung, der Heckrotor war mittels einer 5mm biegsamen Welle angetrieben. Die Drehzahl war abhõngig von der Motordrehzahl, zum Steigen mu▀te man Gas geben, zum Sinken Gas wegnehmen. Das arbeitete mit einer gewissen Verz÷gerung, aber es ging! Mithilfe der Stichw÷rter zu meinem Video verlinkt Youtube weitere Videos aus jener Zeit neben meinem Video. Darunter auch einige aus dem Besitz von Ing. Schlueter. Es ist der gleiche Typ Bell Huey Cobra, die Schlueter 1970 in Harsewinkel demonstriert hatte und in Serie herstellen lie▀. So einen Bausatz habe auch ich gekauft, zusammengestellt und geflogen. Das Bild ist aus einem Schlueter-Video von 1970.
|
|
2 mal MaxiSwift Modell mit Rumpf
...ach, so hoch, man sieht ihn kaum, den oben hõngengebliebenen EasyStar ...
Annette im Aufstieg...
...und nach einiger Zeit zur³ck
|
2015 Inzwischen ist eine lange Zeit vergangen! Meine nahe Heimat aus der Luft und FPV-Perspektive und die Verõnderungen durch die Jahreszeiten zu sehen, ist immer noch faszinierend. Die EasyStar und der EasyGlider haben viele Flüge absolviert. Als neues Modell habe ich 2014 einen Nurflügel MaxiSwift umgebaut. Dem ursprünglich rumpflosen Styropor-Modell ( auch Schaumwaffel genannt) baute ich einen Kastenrumpf aus Balsaholz. Darin ist auch ein RUBY, dem Jim Hall eine Speed von 55 km/h programmierte. An den vielen schönen Tagen 2015 flog ich damit fast täglich. Natürlich geht nicht immer alles glatt. Außenlandungen wg. nachlassender Batteriekapazität und anderen Ursachen kamen schon vor. 2 solche andere Ursachen sorgten für sehr aufregende Flüge. Beidesmal waren zu große Entfernung für meinen Weatronic-Sender schuld. Einmal schaltete RUBY in den dann vorgesehenen "Failsafe" und den "Return-to-Home" Modus. Leider war auf der geraden Flugstrecke zu mir zurück bei Neufrach ein kleiner Hügel mit hohen Tannen dazwischen, an einer blieb das Modell in den obersten Ästen hängen. Nach eingeholten Infos bei der Gemeinde Neufrach-dem Forstamt Schloß Salem und dem Baumpflegedienst Bodensee erreichte ich die Baumkletterin Annette, die wenig später Weltmeisterin in dieser Disziplin geworden ist. Im vergangenen Sommer war es wieder dieser EasyStar, als er im Raum Markdorf außer Video-Kontrolle kam. Schuld waren Bõume zwischen Modell-Video-Sender und meiner Video-Empfangsantenne am Boden. Bäume blockieren die Video-Funkwellen. Zusõtzlich fiel auch noch die RC-Steuerung aus. So wartete ich vergeblich auf eine automatische Rückkehr des Modelles.
Wie die Auswertung der im RUBY gespeicherten Flugdaten ergab, war der EasyStar schnurgerade die vorgegebene Linie abgeflogen, die ich unwissend beim letzten Kontakt eingab, bis der Flugakku leer wurde und das Modell sanft auf das Wasser hinabglitt. Nur eben Richtung Schweiz. RUBY hat getan, was er sollte, nämlich den aktivierten "Aided Modus" exakt einzuhalten. |
Negativform f³r Swiftrumpf mit neuem Rumpf
EasyGlider (2-motorig) und EasyStar
EasyGlider nach einer Landung im Schnee
Ausdruck der Daten des entflogenen RUBY. Im Bild der Bodensee, oben das Ufer von Baden-W³rttemberg , unten das der Schweiz.
|
|
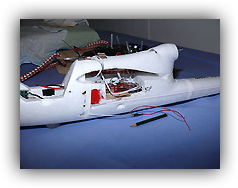
Das ist der Automat RUBY im Modell EasyStar
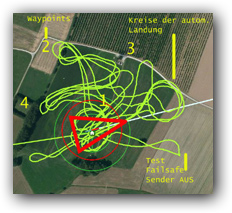
Die Waypoints werden in Google Earth erstellt, im uThere Browser umgerechnet und auf die Micro-Sd kopiert, die in die RUBY-Extension geschoben wird .
RUBY zeichnet den Flug auf mit vielen zusätzlichen Daten wie Geschwindigkeit, Höhe, Stromverbrauch usw
Zum Reschensee-Video mit KLICK auf das Bild
|
2013
Jim Hall programmiert jedes Gerõt selbst, der Datenaustausch funktioniert mit Config-Daten aus einer Micro-SD Karte, die
sich im Steuergerõt befindet. RUBY hõlt die Flugh÷he, Fluggeschwindigkeit ( mittels Pitotrohr gemessen, nicht GPS) und Kurs. RUBY hat alle autonomen M÷glichkeiten, die es heute gibt, wie
Aber einmal RUBY hei▀t immer RUBY. Ruby ist der ideale Begleiter f³r FPV Fliegen, das inzwischen sehr zuverlõssig funktioniert. Zeigen m÷chte ich hier noch zwei Fl³ge: Rund um Nauders und Rund um den Reschensee. |
Bildvergrößern mit DOPPEL-KLICK auf das Bild. Zeitangaben zum Schnell-Scrollen: Anmerkung:
Zum Schluß noch 2 frühere interessante Videos:
Zum Nauders-Video mit KLICK auf das Bild
|
|
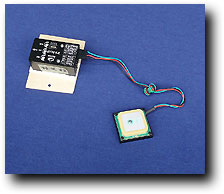
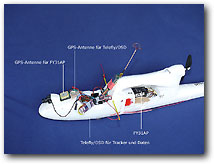
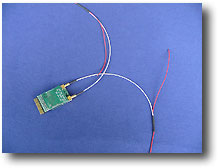
Das ist ein Steuergerät im Aluminiumgehäuse von FEIYU. Die GPS-Antenne leitet die GPS Daten zur Auswertung in die Software der Elektronik. Das FY 31 AP braucht keine Antenne zum Boden. Die Funktionen werden über zwei Kanäle der jeweiligen RC-Funkanlage vorgegeben.
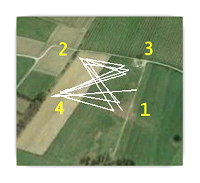
Das ist ein GOOGLE-EARTH Bild im PC mit installierten Wegpunkten. Die GPS-Daten werden von mir eingegeben und mit der FEIYU-Software bearbeitet. Es sieht dann so aus, wie auf dem Bild. Das Modell fliegt tatsächlich auf den vorgegebenen Pfaden!
Dieser Tracker von der Firma MYFLYDREAM kann sich um 360 drehen und vertikal ausrichten. Die Helical-Antennen richten sich damit immer auf das Modell aus.
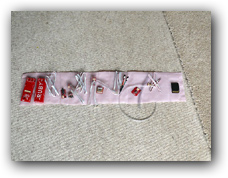
Dieses TeleflyOSD ist im Modell und erfasst die GPS Daten. Sie werden über einen Audio Kanal und dem Video-Sender an den Antennen des Trackers empfangen. Der
Tracker ( oberes Bild) richtet sich auf den ermittelten GPS Punkt
des Modelles.
|
2012
Der EasyStar ist immer noch mein ideales Modell, ist schnell (den Schwerpunkt habe ich weit nach vorne gelegt), und eigenstabil. Nr X, der 10 te? Ich weiß es nicht. Ich habe alles ausprobiert und erfahren müssen, was nicht funktionieren kann. Nicht funktioniert zB hat die anfängliche SPEKTRUM-Fernlenkanlage nach mehr als 900 Meter aufhörte, weiter weg gabs dann mehrere Abstürze. Ebenfalls war die nachfolgende WEATRONIC-FUTABA-Kombination in 2 km am Ende. Das Videosignal zeigte häufig den Absturz, sodaß ich die Reste finden und einsammeln konnte. Einmal sah man im Videobild eindeutig einen Nußbaumast mit Blättern. Der dazugehörende Bauernhof war dann auch schnell ausfindig gemacht und das Modell heruntergeholt. Aber auch die Videokamera versagte mehrfach oder der FATSHARK-Videosender ebenso oder beide auf einmal. Da half dann mehrfach die Peilfunktion des WEATRONIC-Sendemodul, um das Modell oder was davon übrig war, zu orten und wieder zufinden. Viermal fanden Landwirte das Modell und ich konnte es nach telefonischer Information wieder abholen. Natürlich gabs für die Finder einen guten Finderlohn! Ein Modell ist für immer verschwunden. So war nun Ende 2011 die Zeit gekommen, für eine komplette überarbeitung meiner Ausrüstung zu sorgen 1) Die seither von Hand nachgeführten 2 Video-Bodenantennen + DUORECEIVER kamen an einen Tracker von MYFLYDREAM, der sich nach GPS-Punkten orientiert. Diese Daten werden erfasst von einer kleinen OSD(On Screen Display)- Elektronik TELEFLY OSD mit GPS-Antenne im EASYSTAR. Die Informationen werden mit dem Audio-Kanal zum Boden gesendet, der Tracker filtert für sich die GPS-Werte heraus und dreht sich in die passende Richtung. Gleichzeitig sind Werte für Kompassrichtung, Geschwindigkeit, Höhe, Entfernung, jeweilige Richtung zum Abflugpunkt, Flugzeit und Anzahl der GPS-Satelliten dabei, die ich auf den beiden Bildschirmen in der Brille sehen kann. Eine tolle Sache. 2) Zusätzlich installierte ich ein System FEIYU 31 AP, das vom Videosignal unabhängig ist. Es besteht aus einem elektronischen Regler in der Göße einer Zigarettenpackung und einer GPS-Antenne. Beides ist im Modell fixiert. Der Regler merkt sich den Abflugpunkt des Modelles und kann nach entsprechender Wahl im RC-Sender auf diesen Punkt geschaltet werden. Das Modell dreht sofort um und fliegt zurück zum Abflugpunkt. Der Regler enthält zusätzlich Sensoren, die das Modell in einer waagerechten und stabilen Fluglage halten können. Geschaltet wird die FEIYU 31 AP mit zwei 3-Positionsschalter am RC-Sender. Ein Schalter hat die Positionen AUS-LAGEREGELUNG-PFADFLIEGEN und der andere hat RTH-AUS-KREISFLIEGEN. Zurück am Abflugpunkt geht das Modell vollautomatisch in einen Kreis mit 80 Meter Radius und wartet auf weitere Befehle. Ich habe den EASYSTAR so auch schon allein landen lassen, indem ich den Motor ausschaltete, den Sender zur Demonstration auf den Boden stellte und wartete, bis das Modell ins Gras kam. Inzwischen habe ich auch eine weitere Möglichkeit dieser Elektronik eingestellt: ich kann auf einer GOOGLE-Karte bis zu 8 Wegpunkte bestimmen und markieren und diese mittels USB-Kabel in die FEIYU übertragen. Das sieht dann schon gut aus, wie der EASYSTAR die Strecken eigenständig abfliegt, an den Wendepunkten von sich aus die Kurven dreht in die neuen Geraden bis zum Startpunkt zurück und alles wiederholt. 3) Um auf jedenfall immer RC-Kontakt zum Modell zu haben, besitze ich nunmehr eine Longrange-RC-Anlage im Frequenzband von 433 MHz von SCHERRER. Die Reichweite soll bis über 40 km sein. Mir reicht auch weniger, da die Videosender nicht so weit kommen. Mein eigener Rekord ist bei idealen Funkbedingungen nunmehr über 7,5 km, erflogen vom Höchsten bis Heiligenberg und zurück. Manchmal gehts auch nur 2-3km weit. Mit diesen 3 Techniken ist für mich das FPV -Fliegen in einer sehr sicheren Phase angelangt. Ich sitze in meinem Campingstuhl, kann mich entspannt dem Video-Fliegen widmen und freue mich an den unterschiedlichen Beleuchtungen der Landschaft und den damit immer wieder neuen Anblicken meiner Heimat. Wenn das Videobild ausfällt, schalte ich am Sender auf RTH, Return To Home, und warte bis das Modell wieder in den Empfangsbereich zurückkommt. So macht es auch nichts aus, wenn das Videosignal mal ausfällt. Ich muß dann nur den Antennenmast in vermutete Richtung des Modelles von Hand drehen, da mit fehlendem Video auch kein GPS-Signal zur Trackersteuerung mehr kommt. Summa summarum habe ich mit diesem Dreierpack von Reglern, Sendern und Empfängern das System FPV für mich nun ausgereizt. Die umfangreiche Absicherung hat bis jetzt funktioniert und ich kann mich über viele Flüge freuen. Interessant wird in Zukunft die rechtliche Zuordnung des FPV-Fliegen sein. Die Modelle sind Drohnen (UAV, Unmaned Aerial Vehicle) , werden jedoch nicht als Luftfahrzeuge betrachtet ( diesbezügliche Änderung des LuftVG Ende 2011). Modelle sind es auch nicht, da der Pilot keinen Sichtkontakt hat. Die Juristen von DAeC und Modellfliegerverband haben schon sehr konträre Ansichten signalisiert, wie sie das FPV-Fliegen regeln wollen, daß nun der Gestzgeber reagieren muß. Es ist wie vor 30 Jahren, als die Ultraleichtflugzeuge entstanden und niemand wußte, was sie eigentlich sein sollen. Ich war damals auch dabei. Sowas wäre auch für das FPV-Fliegen denkbar. Heute sind es Luftsportgeräte.
|
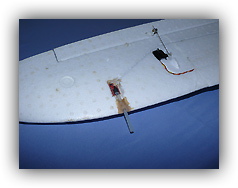
Im Rumpf des EASY-STAR findet alles Platz. Das FY 31 AP ist im Schwerpunkt unter der Tragfläche gut geschützt.
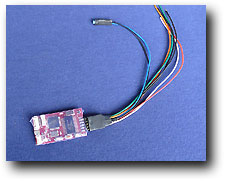
Der 433MHz Empfänger von SCHERRER.
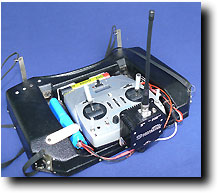
Das ist das Long-Range Sendeteil von SCHERRER. Das PPM-Signal kommt aus einer MULTIPLEX-COCKPIT. Dazu gehört der oben abgebildete Spezial Empfänger.
|
|
|
2011 2011 ist das Jahr des FPV-Fliegen Angeregt durch einige spektakuläre Videos über FPV-Fliegen im Spiegel-Online begann ich mich darüber zu informieren. Aber jetzt mal zurück: Als ersten Level bezeichne ich heute meinen Beginn mit Modellfliegen, ohne Fernlenkung natürlich, vor 63 Jahren ( heute ich bin 75 Jahre alt) und baute 1948 mit 12 Jahren mein erstes Modell "Ikarus"), Der nächste Level dann waren solche Modelle mit Motor ( 1,5 ccm Webra Diesel). Ein ganz großer Sprung war die erste Fernsteuerung. 1979 wieder ein neuer Level: ich baute meinen ersten Modellhubschrauber
(Schlüter Cobra), Jeder dieser Schritte von Level zu Level war faszinierend und brauchten finanziell und mental den vollen Einsatz. Am Freitag, 22.Juli 2011, flog ich zum ersten Mal FPV. Ein Easystar ist das Modell, ich habe eine Fatshark-Brille auf der Nase. An meinem Entsetzen merkte ich, wie infiziert ich nach 5 Minuten schon war!
Seither fliegt der Easystar fast täglich. Ich habe das Gefühl, viele Flugstunden nachholen zu müssen. Ich bin total fasziniert und befinde mich in einer ständigen Sektlaune. Das 1. was ich lernte, ist, daß ich mich voll auf die Kameraverlassen MUSS! Ich schätze die Reichweite meiner Ausrüstung auf höchstens 400 m, aber auch da ist eine schnelle Sichtverbindung zu dem kleinen Modell fast nicht mehr möglich, wenn man bei hellem Himmel die Brille abnimmt und zur Direktsicht wechseln will oder muß. Das kann man vergessen. Worin liegt nun der Reiz des FPV-Fliegen? Man hat sich mit der Brille von der Umgebung am Boden ausgeklinkt. Das geht so weit, daß manche Piloten Gleichgewichtsprobleme bekommen oder sogar umfallen! Beim ersten Looping mußte ich mich auch an meinem Campingstuhl festhalten. Man ist nur noch über Video mit dem Modell verbunden, was man aber gar nicht checkt, sondern nur dem sichtbaren Ausschnitt des Videos folgt. Hier spielt die Musik! Wenn ich die Brille nach 20 Minuten wieder abnehme, bin ich erstaunt, wies um mich herum aussieht. Täuschung pur. FPV-Fliegen ist Illusion mit anspruchvollster Technik. Viele erleben das inzwischen, jetzt bin ich auch dabei, ich freue mich. Was passiert bei Video-Ausfall? Da man ja den Kopf nicht immer in die Richtung des Modelles gedreht hat, muß man bei Video-Verlust erst mal das Areal entscheiden, in dem sich das Modell befinden könnte. Dann die Brille hochnehmen und----? Wo ist denn das Modell?? Nicht-Größe des Modelles und Areal-Suche zusammen ergeben, daß man das Modell meist zu spät oder gar nicht mehr entdeckt. Easystar1 ging so verloren und trotz Telefonnummer auf dem Rumpf kam bis heute noch keine Fundinfo. Inzwischen fliegt Easystar2. Demnach: nur das Video zählt. Man hängt an der Kamera!! Das ist FPV-Fliegen! Ich habe einige anfängliche Flüge mit Modellfliegerfreunden gemacht, die das Modell visuell verfolgten. Das ging super und verläßlich. Aber die Freunde hat man nicht immer greifbar. Was ich jetzt brauche, ist ein Ausrüstung, die mir eine größere Reichweite ermöglicht und weniger Bildstörung. Das FPV Fliegen ist mein derzeit höchster Modellflug-Level! Es gibt mir tägliche Sektlaune.
|
Neu in FPV Video aus dem EasyStar
|
|
|
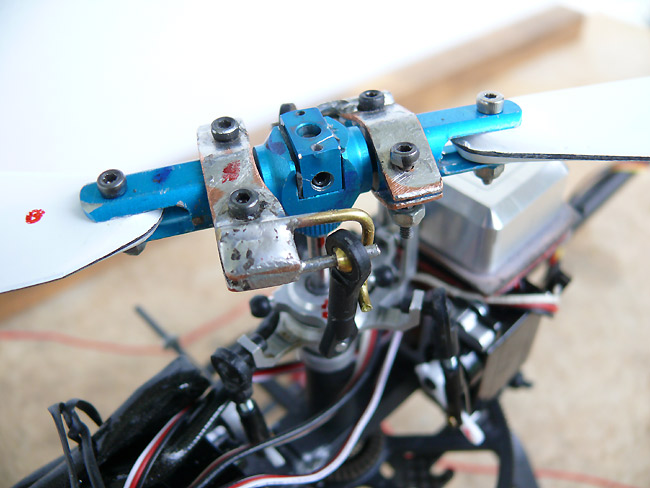
2010 2009 stand wie seither im Zeichen von Logo 600 und NT. Auch die Benziner in den beiden Hughes laufen jetzt. Im Juni 2009 baute ich das 4 Meter-Segelmodell EXCEL 4004 von Simprop und erlebte sehr schöne Thermikflüge bis etwa 600 Meter über Grund. Ab 600 Meter habe ich Sicht- und Erkennungsschwierigkeiten. Unterstützt hat mich das Vario WSTECH von unserem Clubkameraden Wolfgang Schreiner. Viele Flüge im Thermikpulk mit Bussarden, Gabelweihen und später im Jahr dann auch Jungstörchen haben mich dann doch sehr beeindruckt. Den Excel 4004 starte ich meist von einem angepassten Rollwagen und das immer vollkommen problemlos, da mir der Segler wegen einer Armverletzung für den Wurfstart zu schwer ist. Gelegentlich nutze ich einen Katapultstart mit Gummiseil und Apparat von Flühs-Winden. 2009 begann ich mich auch für Tragschraubermodelle zu interessieren. Aus der Summe der Beobachtungen und Analysen wurden die Starts immer besser. 2010 baute ich mir dann den im Vergleich zum ROTORSHAPE größeren RAINBOW. Das war jedoch nicht so einfach, da der Original-Rainbow die Nicksteuerung über das Höhenruder machen soll. Deshalb habe ich das Höhenruder fixiert und die auf dem Bild erkenntliche Kopfkippsteuerung gebaut. Mit großem Erfog!! Leider hat der Rainbow ein weiteres Problem: wenn er im Flug zu schnell wird, bäumt sich das nach vorne laufende Blatt auf, da die Befestigung am Rotorkopf zu schwabbelig ist. Jetzt zu Beginn des Jahres 2011 habe ich Helis, Segler und Autogyro im Griff und ich freue mich auf die neue Saison.
|
|
|
|
2008/2009 Am 1. Januar 2009 NEUJAHRSFLIEGENZum NIKOLAUSFLIEGEN 2008 des Vereins mit geschmücktem Logo 600 |
 |
|
|
Wasenweiler 2006 NT und Hughes 500 Vario mit Comeback-Mechanik |
 |
|
|
ACROBAT SE 2006 Hier ist er nun, der Acrobat SE.
|
 |
|

|
HORNET 2008 2007 kamen die ersten V-Stabi Regler auf den Markt. Damit
kann man 1. ohne Paddel fliegen, da die Elektronik in Verbindung mit
Piezo-Lagereglern die Weiterleitung der Steuerimpulse des Senders
übernehmen. |
|
|
 |
HORNET 2006 Seit Dezember 2004 beschäftige ich mich mit Hornets. Nach ersten
Problemen bekam ich die Winzlinge (dh. es waren nach einiger Zeit
3 Stück) ganz ordentlich zum Fliegen. |
 |
|
|
MODELLFLIEGEN 2006 Auch im Modellfliegen geht die Zeit weiter. |
|
|
|
MODELLFLIEGEN Schon mit 12 Jahren träumte ich vom Fliegen. Deshalb entstand 1948
das Segelflugmodell Ikarus (1) aus einem Materialbausatz und es folgten
viele Eigenkonstruktionen(2). Rechts ist ein Bild von 1974. Sensation: neues Video von 1970 aufgetaucht,1970-Mein erster Flug mit einem Modellhubschrauber ³berhaupt, mit der Schlueter-Cobra auf dem Flugplatz Friedrichshafen-1970 Damals war die von Ing. Schlueter konstruierte Modell-Hubschrauber-Mechanik eine Sensation. Er konstruierte auch gleich einen passenden Rumpf dazu, einen Nachbau der Cobra.
|
|
... auch das ist Fliegen! Mit meinem Gleitschirm im Montafon vom Hochjoch in Schruns...